|
"루시"란..
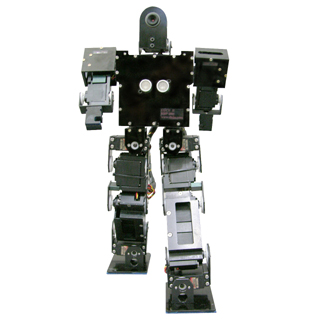
최초의 인간 '오스트랄로 피테쿠스'의 최초 화석의 이름을 딴 휴머노이드 로봇 루시. 18개의 관절로 인간의 보행 매카니즘을 구현한 2족 보행 지능로봇입니다.
특징
-32비트의 높은 CPU성능으로 인해 이미지 처리를 비롯하여 보행에 필요한 계산을 수행할 수 있다.
-512K의 메모리를 보유하고 있기 때문에 인공지능 실험실습을 비롯한 난이도가 높은 알고리즘을 구현하기에 적당하다.
-Turbo C++를 비롯한 DOS Application 실행파일을 대부분 수용하기 때문에 Application 개발이 용이하며 Debugging작업이 빨리 이루어 질 수 있다.
-초소형 싸이즈로 중형 로봇 Application이나 산업용 Application을 연구하거나 학습하기에 적당하다.
-사용자의 사양에 따라 로봇의 변형과 기구적 Upgrade가 용이하다.
-ZMP를 비롯한 보행관련 연구를 위해 다양한 센서의 부착이 쉽다.
개발 연혁
-1999.9 다진의 휴머노이드 로봇 기반 구축
-1999.11 다진의 후머노이드 로봇 프로젝트 시작
-2000.1 14자유도의 보행 로봇 DV 최초 탄생
-2000.2 다진의 휴머노이드 로봇 두번째 버전의 DV2 개발 시작
-2000.4 DV2의 몸체와 H/W 개발 완료, 보행 매카니즘 시험 단계 착수
-2000.5 다진의 휴머노이드 로봇 DV2 개발 완성
-2002.12 휴머노이드 로봇 LUCY II 개발 완성
사양
-모 델 명 : RBP-DLX02
-사 이 즈 : 200 X 110 X 402 (mm)
-무 게 : 2600g(배터리 포함)
-자 유 도 : 18자유도 (머리 DOF : 2 / 팔 DOF : 2 X 2 / 다리 DOF : 6 X 2)
-센 서 : 1/4' CCD Camera, 초음파 센서 장착
-외부전원 : DC 5V 6A(Servomotor Power 1ea, MainCPU Powr 1 ea)
- CPU : Main CPU : 80386EX(Intel) / SUB CPU : PIC16F873, PB3B
-Processor : 386 보드
-Memory : 512K
-통신 방식 : RS-232C
-무선 통신 : BIM433F
-기구 재질 : 알루미늄 & SPC & 아크릴
|





 Click to enlarge image
Click to enlarge image  Company
Company